Makinang Pang-Pakintab na Robotiko – Mataas na Katumpakan na Awtomatikong Pagtatapos ng Ibabaw





Detalyadong Dayagram
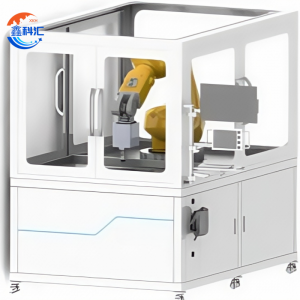

Pangkalahatang-ideya ng Robotic Polishing Machine
Ang Robotic Polishing Machine ay isang makabago at ganap na automated na sistema ng pagproseso ng ibabaw na idinisenyo upang matugunan ang pinakamataas na kinakailangan sa precision manufacturing. Pinagsasama nito ang anim na axis na robotic control, force-feedback polishing technology, at dual-head configuration upang pangasiwaan ang malawak na hanay ng mga materyales at kumplikadong geometry nang may pambihirang katumpakan at pagkakapare-pareho.
Para man sa mga optical lens, mga piyesa ng aerospace, mga bahagi ng precision engineering, o mga aplikasyon sa semiconductor, ang makinang ito ay naghahatid ng matatag, nauulit, at de-kalidad na mga surface finish—kahit na sa mga tolerance na nasa antas ng nanometer.


Komprehensibong Pagkakatugma ng Workpiece ng Robotic Polishing Machine
Sinusuportahan ng sistema ang pagproseso ng:
-
Mga patag na ibabawpara sa salamin, seramika, at mga platong metal
-
Mga hugis na silindro at konotulad ng mga roller, shaft, at tubo
-
Mga bahaging spherical at asphericalpara sa mga sistemang optikal
-
Mga ibabaw na malayang anyo at wala sa ehena may mga kumplikadong kurba at transisyon
Ang kagalingan nito sa iba't ibang aspeto ay ginagawa itong angkop para saparehong malawakang produksyon at mataas na katumpakan na pasadyang pagmamanupaktura.
Mga Pangunahing Tampok at Benepisyo ng Robotic Polishing Machine
1. Teknolohiya ng Dual Polishing Head
-
Nilagyan ngiisang pag-ikotatpag-ikot sa sarilipagpapakintab ng mga ulo para sa kakayahang umangkop.
-
Ang mabilis na kakayahang magpalit ng kagamitan ay sumusuporta sa maraming processing mode nang walang mahabang downtime.
-
Mainam para sa paglipat sa pagitan ng magaspang at pinong mga yugto ng pagpapakintab.
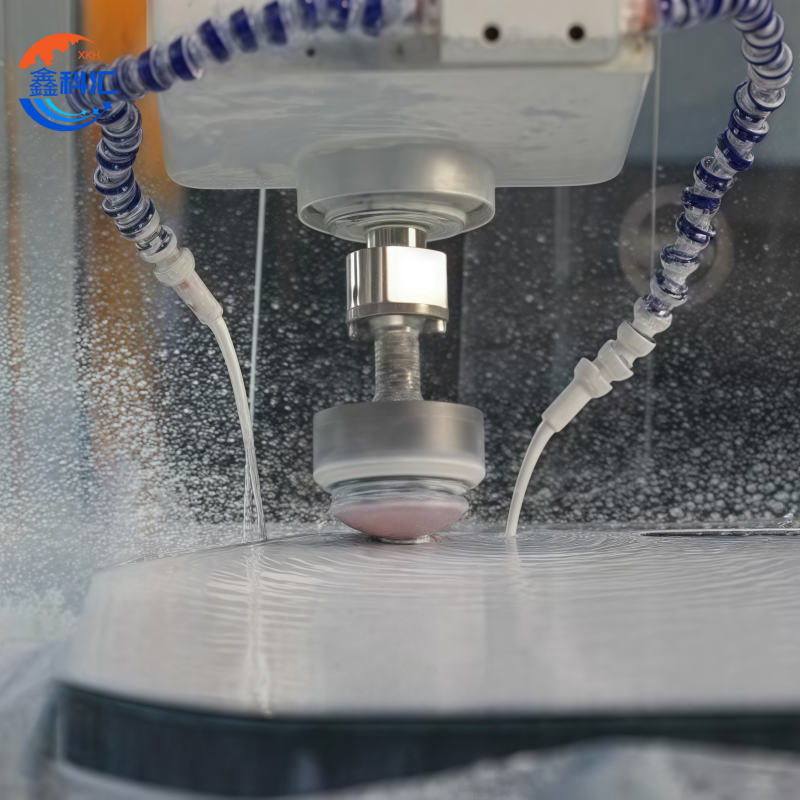
2. Sistema ng Pagkontrol ng Puwersa na may Katumpakan
-
Pagsubaybay sa totoong oras ngpresyon, temperatura, at daloy ng likidong pampakintab.
-
Tinitiyak ng pare-parehong paglalapat ng puwersa ang pantay na pagtatapos ng ibabaw sa buong workpiece.
-
May kakayahang awtomatikong umangkop sa mga iregularidad sa ibabaw.
3. Kontrol ng Robot na Anim-Axis
-
Ganap na kalayaan sa paggalaw upang mahawakan ang mga kumplikadong heometriya.
-
Maayos at tumpak na mga landas ng paggalaw na kinalkula gamit ang mga advanced na algorithm.
-
Mataas na katumpakan ng pagpoposisyon nang paulit-ulit mula ±0.04 mm hanggang ±0.1 mm depende sa modelo.
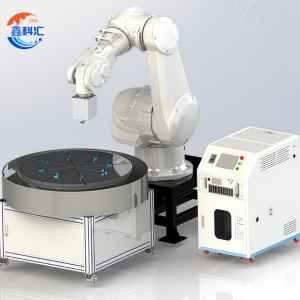
4. Matalinong Awtomasyon at Pagsukat
-
Mga tool sa awtomatikong pagkakalibrate para sa tumpak na pag-setup at pag-align.
-
Sistema ng pagsukat ng koordinasyon para sa tumpak na pagpoposisyon.
-
Opsyonalonline na pagsubaybay sa kapalpara sa real-time na kontrol sa kalidad.
5. Kalidad ng Paggawa na Pang-industriya
-
Pinapataas ng dual servo-motor na disenyo ang kahusayan at katatagan ng pagpapakintab.
-
Binabawasan ng matibay na mekanikal na istraktura ang panginginig ng boses at tinitiyak ang pangmatagalang tibay.

Mga Teknikal na Espesipikasyon ng Robotic Polishing Machine
| Modelo ng Kagamitan | Katawan ng Robot | Katumpakan ng Pagpoposisyon nang Paulit-ulit | Saklaw ng Diameter ng Pagproseso | Isang Ulo ng Pagpapakintab na may Iisang Pag-ikot | Ulo ng Pagpapakintab na May Maraming Pag-ikot | Maliit na Kagamitan | Pangunahing Uri ng Pagkintab ng Gulong | Pagpapakintab ng Spherical Head | Tapusin ang Mabilis na Pagbabago | Kagamitan sa Awtomatikong Pag-calibrate | Pinuno ng Pagsukat ng Koordinasyon | Pagsubaybay sa Kapal Online | Plataporma ng Kontrol na Numerikal |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0.04mm / buong saklaw | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0.05mm / buong saklaw | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0.05mm / buong saklaw | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0.06mm / buong saklaw | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0.1mm / buong saklaw | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0.1mm / buong saklaw | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0.1mm / buong saklaw | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Mga Madalas Itanong – Makinang Pang-polish ng Robot
1. Anong mga uri ng workpiece ang kayang hawakan ng robot polishing machine?
Sinusuportahan ng aming robot polishing machine ang iba't ibang hugis at ibabaw, kabilang ang patag, kurbado, spherical, freeform, at kumplikadong mga contour. Ito ay angkop para sa mga optical component, precision mold, metal surface, at iba pang high-precision na aplikasyon sa pagpapakintab.
2. Ano ang pagkakaiba ng mga ulo ng pamunas na Single Rotation at Multi-Rotation?
-
Isang Ulo ng Pagpapakintab na may Iisang Pag-ikotAng kagamitan ay umiikot sa iisang aksis, mainam para sa karaniwang pagtatapos ng ibabaw at mabilis na pag-aalis ng materyal.
-
Ulo ng Pagpapakintab na May Maraming Pag-ikotPinagsasama ng kagamitan ang pag-ikot at ang kusang pag-ikot (pag-oorbit), na nagbibigay-daan sa mas pantay na pagpapakintab sa mga kurbado at hindi regular na mga ibabaw.
3. Ano ang pinakamataas na diyametro ng pagproseso?
Depende sa modelo:
-
Mga compact na modelo (hal., IRP500S) na hawakanΦ50–Φ500mm.
-
Ang mga malalaking modelo (hal., IRP2000AD) ay kayang humawak ng hanggangΦ2000mm.
Tungkol sa Amin
Ang XKH ay dalubhasa sa high-tech na pagpapaunlad, produksyon, at pagbebenta ng mga espesyal na optical glass at mga bagong crystal materials. Ang aming mga produkto ay nagsisilbi sa optical electronics, consumer electronics, at militar. Nag-aalok kami ng mga Sapphire optical components, mobile phone lens covers, Ceramics, LT, Silicon Carbide SIC, Quartz, at semiconductor crystal wafers. Taglay ang bihasang kadalubhasaan at makabagong kagamitan, mahusay kami sa non-standard na pagproseso ng produkto, na naglalayong maging isang nangungunang high-tech enterprise ng optoelectronic materials.

Mga Kaugnay na Produkto
-

4H-semi HPSI 2inch SiC substrate wafer Produkto...
-
Pasadyang parisukat na kahon ng transportasyon na kahon ng parisukat na bintana p ...
-

6 pulgadang HPSI SiC substrate wafer Silicon Carbide ...
-

Sapphire Corundum para sa Gemstone Al2O3 crystal ru...
-

Aluminyo metal na nag-iisang kristal na substrate polishe...
-

Wafer na may patong na Au, wafer na sapiro, wafer na silikon...